☑ Atex columna
☑ Atex suspendido corredero
☑ Atex suspendido fijo
☑ ColumnaFixed Overhead
☑ Inox Columna
☑ Inox suspendido corredero
☑ Inox Suspendido fijo
☑ Suspendido corredero
☑ Suspendido fijo
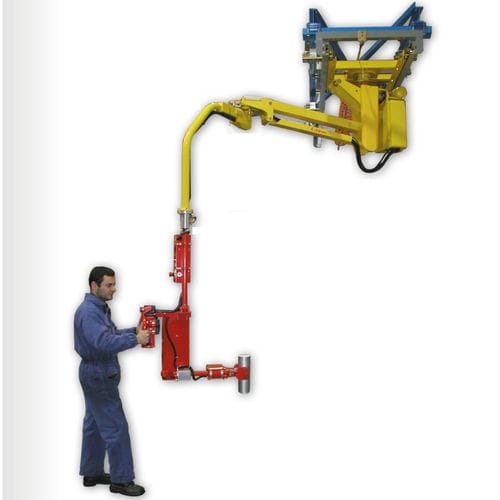
MANIPULADOR NEUMATICO MICROPARTNER CON BRAZOS ARTICULADOS
El manipulador neumático MICROPARTNER MI por sus dimensiones reducidas se convierte en un instrumento particularmente manejable para mover en ausencia de peso y en todas las direcciones del espacio, cargas semi ligeras en eje o desplazadas del eje.
Equipado con especiales útiles de toma, permite al operario trabajar velozmente, con precisión y sin esfuerzo físico en óptimas condiciones de ergonomía y seguridad.
Brida de anclaje
El manipulador neumático en ejecución suspendida fixa permite dejar libre todo obstáculo del suelo.
La brida del manipulador se realiza con agujeros para el anclaje mediante tornillos a una placa robusta al techo o a un estante.
Todos los movimientos en el espacio son libres y se obtienen con un mínimo esfuerzo por la acción directa del operador sobre el útil de toma o sobre la carga.