
- Metrología - Laboratorio
- Monitoreo e Inspección
- Sensor óptico de luz
- HEXAGON MANUFACTURING INTELLIGENCE
Sensor óptico de luz TTLpara máquina de medición tridimensional

Añadir a mis favoritos
Añadir al comparador
Características
- Magnitud física
- de luz
- Aplicaciones
- para máquina de medición tridimensional
Descripción
El láser TTL y el sensor de visión de procesamiento de imágenes comparten una misma trayectoria óptica ("Through-The-Lens"). Este principio coaxial permite cambiar sin problemas entre la cámara y el láser. Como este concepto no implica un desplazamiento entre los dos sensores, no se produce ninguna pérdida de rango de medición en la dirección X y la calibración se reduce al mínimo.
Como sensor de autoenfoque rápido, el láser TTL utiliza la luz láser reflejada en la superficie del objeto inspeccionado para encontrar la mejor posición de enfoque para el sensor de visión. La distancia a la superficie de la pieza inspeccionada se determina mediante la triangulación de la luz reflejada y se utiliza para el seguimiento vertical de la cámara. El láser TTL acelera claramente el proceso de enfoque en comparación con las técnicas convencionales de enfoque por vídeo, a la vez que consigue buenos valores de reproducibilidad. El resultado es una mayor velocidad de medición y, por tanto, un mayor rendimiento de las piezas inspeccionadas.
El láser TTL puede realizar mediciones de altura utilizando una combinación de puntos de enfoque en diferentes niveles de la pieza, al tiempo que mide la profundidad de los agujeros ciegos más pequeños utilizando el principio coaxial.
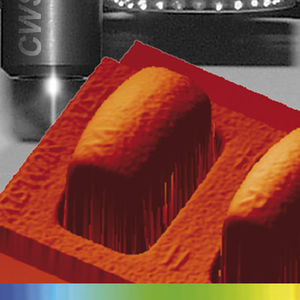
La exploración es otra aplicación del láser TTL. Con una alta densidad de puntos de medición de hasta 350 puntos por segundo, el sensor es capaz de captar el perfil de superficies de forma libre sin contacto y, por tanto, de forma no destructiva.
Ejemplos de aplicaciones del láser TTL:
Enfoque rápido del sensor de visión
Mediciones precisas de alturas, profundidades de agujeros y superficies planas
Escaneo de contornos y superficies
---
Catálogos
No hay ningún catálogo disponible para este producto.
Ver todos los catálogos de HEXAGON MANUFACTURING INTELLIGENCEFerias
Este distribuidor estará presente en las siguientes ferias


Otros productos de HEXAGON MANUFACTURING INTELLIGENCE
Máquinas de medición de coordenadas




















































* Los precios no incluyen impuestos, gastos de entrega ni derechos de exportación. Tampoco incluyen gastos de instalación o de puesta en marcha. Los precios se dan a título indicativo y pueden cambiar en función del país, del coste de las materias primas y de los tipos de cambio.