- Mecánica - Transmisión de potencia
- Actuador y Posicionamiento
- Platina de posicionamiento XYZ
- NATSU PRECISION TRADE LIMITED
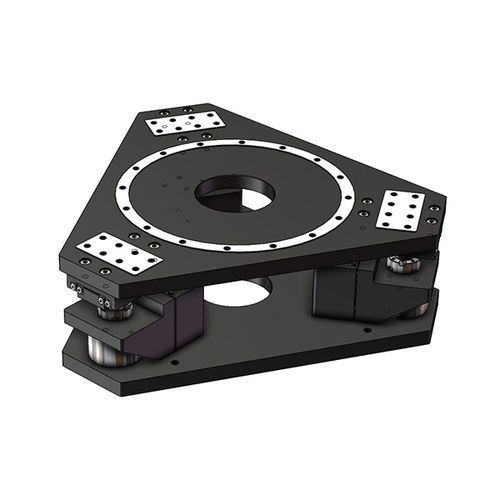
Platina de posicionamiento XYZ E-TRI-R5motorizada3 ejesde precisión

Añadir a mis favoritos
Añadir al comparador
Características
- Orientación
- XYZ
- Tipo
- motorizada
- Número de ejes
- 3 ejes
- Otras características
- de precisión, compacta, corrediza
- Carga
20 kg
(44,09 lb)
Descripción
Diseño cinemático paralelo para tres grados de libertad, lo que lo hace significativamente más compacto y rígido que los sistemas cinemáticos en serie, mayor dinámica, sin cables desplazados: Mayor fiabilidad, menor fricción.
Etapas de movimiento paralelo de TRI ejes
Es el producto especializado de nuestra empresa. En comparación con otras plataformas multigrado de libertad de gama alta, tenemos un rendimiento de alto coste.
Los tres ejes adoptan una estructura paralela, y cada eje puede equiparse con un motor paso a paso o un servomotor. El algoritmo de control único dentro del controlador logra un control de alta precisión;
Optimiza la rigidez de todo el sistema;
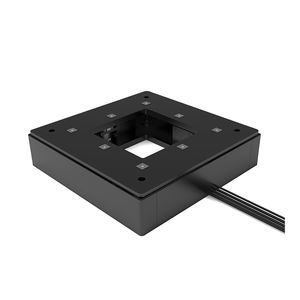
Puede haber una abertura libre en el centro de la plataforma;
Adecuado para: investigación científica, micromanipulación, biotecnología, fabricación de semiconductores, etc.
Los motores paso a paso son especialmente adecuados para velocidades bajas. Pueden controlarse con gran exactitud y garantizan una gran precisión. Al prescindir de contactos deslizantes, funcionan con suavidad, no se desgastan y alcanzan así una larga vida útil.
Herramienta de simulación de hexápodo El software de simulación simula los límites del espacio de trabajo y la capacidad de carga de un hexápodo.
Industria e investigación. Para microfabricación, tecnología médica, inspección de herramientas.
● Rangos de desplazamiento hasta ±5 mm / ±2,5°
● Capacidad de carga hasta 20 kg
● Repetibilidad hasta ±0,2 µm
● Velocidad hasta 5 mm/s
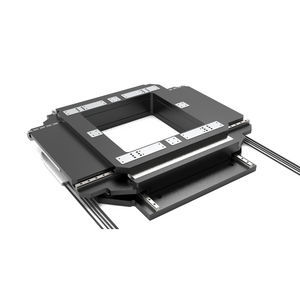
● En un sistema paralelocinemático multieje, todos los actuadores actúan directamente sobre una única plataforma móvil.
---
Catálogos
No hay ningún catálogo disponible para este producto.
Ver todos los catálogos de NATSU PRECISION TRADE LIMITEDOtros productos de NATSU PRECISION TRADE LIMITED
Multi-Axis stages
















Búsquedas asociadas
- Platina de posicionamiento precision STAGE
- Platina de posicionamiento lineal precision STAGE
- Platina de posicionamiento motorizada precision STAGE
- Platina de posicionamiento de precisión precision STAGE
- Mesa de posicionamiento manual
- Platina de posicionamiento de un eje
- Mesa de posicionamiento 2 ejes
- Platina de posicionamiento compacta precision STAGE
- Platina de posicionamiento rotativa precision STAGE
- Platina de posicionamiento XY precision STAGE
- Platina de posicionamiento multieje precision STAGE
- Platina de posicionamiento de alta precisión precision STAGE
- Platina de posicionamiento piezoeléctrica
- Platina de posicionamiento industrial precision STAGE
- Mesa de posicionamiento 3 ejes
- Platina de posicionamiento de husillo de bolas
- Mesa de posicionamiento XYZ
- Platina de posicionamiento Z precision STAGE
- Platina de posicionamiento compatible de vacío
- Platina de posicionamiento en miniatura
* Los precios no incluyen impuestos, gastos de entrega ni derechos de exportación. Tampoco incluyen gastos de instalación o de puesta en marcha. Los precios se dan a título indicativo y pueden cambiar en función del país, del coste de las materias primas y de los tipos de cambio.