
- Productos
- Catálogos
- News & Trends
- Ferias
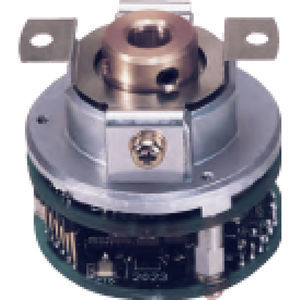
Encoder rotativo absoluto SI35 series18 bits20 bits22 bits

Añadir a mis favoritos
Añadir al comparador
Características
- Tipo
- absoluto
- Resolución de los codificadores absolutos
- 18 bits, 20 bits, 22 bits
- N.º de revoluciones de los codificadores absolutos
- 18 bits, 20 bits, 22 bits
- Señal de salida
- en serie
- Conexión eléctrica
- conector M12
- Tensión de alimentación
- 5 V CC
- Temperatura de proceso
Máx.: 85 °C
(185 °F)Mín.: -10 °C
(14 °F)
Descripción
Los encóderes absolutos emiten el valor absoluto de los ángulos de rotación y se utilizan para controlar la posición de servomotores montados en máquinas herramienta o robots. Las ranuras indican cadenas de código binario de 2 impulsos/rev desde el centro.Los codificadores absolutos multivuelta memorizan los datos de cantidad de rotación a lo largo de una rotación.
Datos técnicos
Aplicaciones
Control de motores, Para robots
Características
Motor de pequeña potencia
Transferencia de datos en serie
Alta resolución
Eléctrico
Especificaciones
Fase de salida
Binario puro
Tensión de alimentación
CC+5 V
Corriente
Consumo
110mA TYP.
125mA TYP.
Forma de salida
Controlador de línea
Velocidad máxima de rotación
6.000min-1
Mecánica
Espec.
Par de arranque
-
5.9×10-3N⋅m Máx
Tolerancia de montaje
Radial
0.05mm TIR Máx
-
0.05mm TIR Máx
Axial
0.1mm Max
-
0.1mm Max
Desviación del eje
0.1°
-
0.1°
Velocidad máxima
6.000 min-1
Masa
0.03 kg máx
0.06 kg máx
Entorno
Clase de protección
Marco abierto
Vibración
98m/2 (10G)
Choque
1.960m/s2 (200G)
---
Otros productos de Tamagawa Europe GmbH
Rotary Encoders









Búsquedas asociadas
- Codificador rotatorio
- Encoder incremental
- Encoder rotativo incremental
- Encoder rotativo absoluto
- Encoder rotativo óptico
- Encoder rotativo para la industria
- Encoder rotativo magnético
- Encoder rotativo DC
- Encoder rotativo compacto
- Encoder rotativo monovuelta
- Encoder rotativo con brida
- Encoder rotativo multivuelta
- Encoder rotativo 5 V CC
- Encoder rotativo analógico
- Encoder rotativo 24 Vcc
- Encoder rotativo 12 Vcc
- Encoder rotativo reforzado
- Encoder rotativo 12 bits
- Encoder rotativo 16 bits
- Unidad de medición inercial
* Los precios no incluyen impuestos, gastos de entrega ni derechos de exportación. Tampoco incluyen gastos de instalación o de puesta en marcha. Los precios se dan a título indicativo y pueden cambiar en función del país, del coste de las materias primas y de los tipos de cambio.